 分享领红包
分享领红包

分享给好友,每有1人领取红包,您将获得相同奖励。自己也可以领取哦〜
- {{item}}
- {{item}}
历史搜索
热门搜索
历史搜索
热门搜索
本期CV就业3,除了继续沿用上一期七月在线完整的“作业考试且批改”的完善教学机制,以及一周两次直播之外,在内容、项目、就业上继续升级:
不仅如此,为了让学员进入项目阶段后更好的实战各项目,不但每周进行直播辅导,而且标准化项目阶段的完整流程:
一切为了学员更好的就业。
面向群体: 因为本课程采用严格筛选制(通过率不到1/3),需要具备一定的基础能力才能报名通过,故以下同学优先:
申请学员(以下简称学员)填写报名申请表并附上简历,电话或远程面试通过后,才视为报名成功,然后学员和七月在线(以下简称机构)双方签订培训合同。
课程开始前,提供预习视频预习,课程开始后,每周安排直播、录播、实训、答疑,然后每两周考试一次,顺利通过阶段考试的学员,才能进入下一阶段的学习。未能通过考核的重新学习,做查漏补缺。
在线视频:图像处理基础
在线视频:图像处理进阶
在线实训:图像拼接
在线直播:计算机视觉基础
在线直播:三维计算机视觉
在线视频:机器学习基础和神经网络
在线实训:使用TensorFlow/Keras快速搭建神经网络进行图像分类
在线视频:深度卷积神经网络原理与实践
在线实训:百行代码实现Kaggle图像分类竞赛Top-5%
在线直播:机器学习与深度学习基础
在线直播:深谈深度学习基础问题
在线视频:解析STOA深度卷积神经网络及调参优化技巧
在线实训:使用Autoencoder和ConvNets构建图像搜索系统
在线视频:大规模车辆图片搜索/重识别(ReID)
在线实训:使用TensorFlow/Keras由浅入深搭建规模车辆图片搜索系统
在线直播:Two-Stage物体检测
在线直播:One-Stage物体检测
在线视频:目标检测及其在无人驾驶领域的作用
在线实训:使用TensorFlow/PyTorch在COCO数据集上进行目标检测
在线视频:深度学习在图像语义分割中的应用
在线实训:使用TensorFlow在COCO数据集上进行语义分割
在线直播:2019物体检测领域新趋势
在线直播:语义分割的核心算法与工业应用
在线视频:RNN及其应用(image captioning and VQA)
在线实训:使用Keras/PyTorch 搭建一个Image Caption模型
在线视频:深度学习前沿:理解AlphaGo (强化学习) 和生成模型(GAN)背后的原理
在线实训:手把手教你如何使用TensorFlow/PyTorch实现GAN
在线直播:轻量级卷积神经网络与模型压缩
在线直播:临阵磨枪之Kaggle比赛经验速成
在线直播:Kaggle 比赛 - 重写Notebook kerne
在线直播:项目1 图像分割系统,和项目4 SLAM三维重建系统的介绍
在线直播:项目2 人体关节点提取,和项目3 给定图像自动生成描述的介绍
在线直播:项目5 图像细粒度分类,和项目6 跨镜追踪/重识别(ReID)的介绍
在线直播:项目1 图像分割系统,和项目4 SLAM三维重建系统的特征工程
在线直播:项目2 人体关节点提取,和项目3 给定图像自动生成描述的基本方法详解
在线直播:项目5 图像细粒度分类,和项目6 跨镜追踪/重识别(ReID)的数据与环境
在线直播:项目1 图像分割系统,和项目4 SLAM三维重建系统的模型构建
在线直播:项目2 人体关节点提取,和项目3 给定图像自动生成描述的模型构建
在线直播:项目5 图像细粒度分类,和项目6 跨镜追踪/重识别(ReID)的模型构建
在线直播:项目1 图像分割系统,和项目4 SLAM三维重建系统的整体实现
在线直播:项目2 人体关节点提取,和项目3 给定图像自动生成描述的整体实现
在线直播:项目5 图像细粒度分类,和项目6 跨镜追踪/重识别(ReID)的整体实现
在线直播:在线实训内容精讲-使用Keras/PyTorch 搭建一个Image Caption模型详解
在线直播:在线实训内容精讲-图像拼接和手写字符识别详解
在线直播:在线实训内容精讲-目标检测和如何使用TensorFlow/PyTorch实现GAN详解
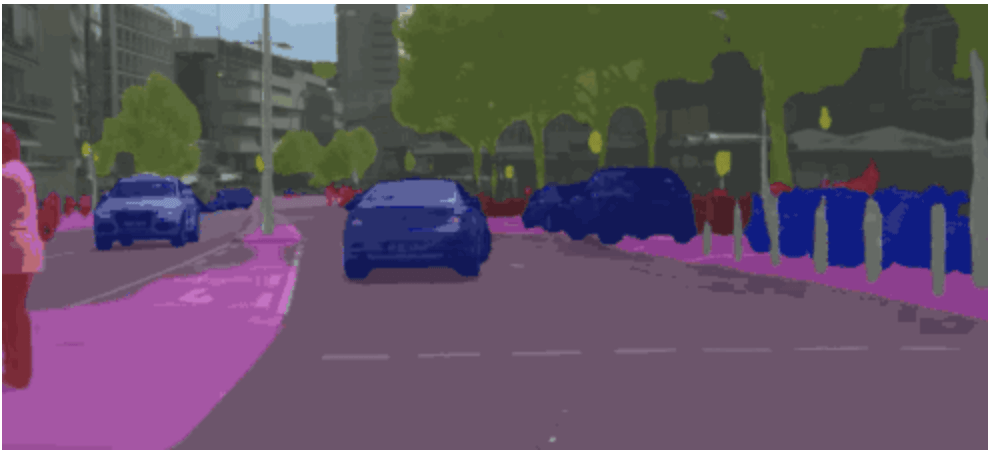
图像分割一直是计算机视觉领域的一个研究热点,尤其在深度学习技术的推动下,图像分割开始从研究走向应用,图像分割广泛应用于机器人导航,自动驾驶,图像的艺术化处理,短视频编辑等等领域。
通过本项目,我们可以学会从零开始搭建一个基于深度学习的图像分割系统,并应用于实际应用中,并对图像分割领域的最新研究理论有深入的理解和思考。

人体关节点提取可以广泛应用于人体运动分析,人体行为分析,游戏娱乐,虚拟现实等等领域。通过本项目,你将学会搭建一套基于深度学习的人体关键点提取系统。
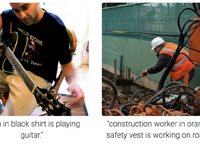
给出一张图,对图像做出描述,比如一个穿着黑衣服的人在弹吉他。该项目涉及多个视觉重的子任务,例如检测、识别;又和自然语言处理结合紧密(RNN/LSTM)。通过该项目的训练,学员能将过去学过的知识融会贯通,掌握high-level计算机视觉任务是如何从底层子任务构建起来的。
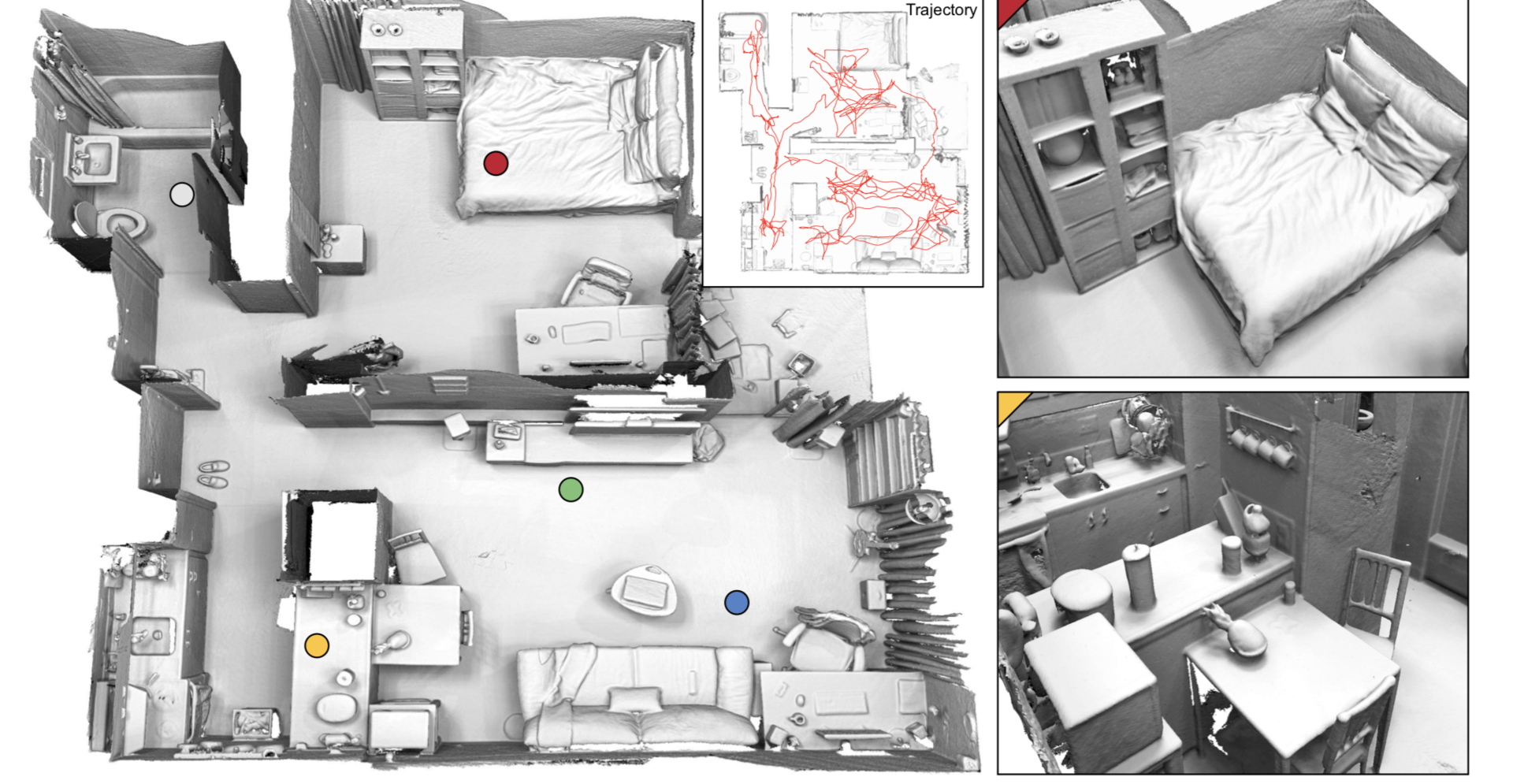
SLAM(simultaneous localization and mapping)同时构建地图和定位是近年来计算机视觉领域的研究热点,广泛应用于AR导航,机器人,自动驾驶等等热点领域。通过本项目,我们能够对SLAM理论基础,最新研究进展有深入的理解和思考,并能够搭建一套应用于工业界的SLAM系统,用于对特定物体和场景进行实时精确的三维重建。

细粒度图像分类(Fine-Grained Categorization)在工业界和学术界都有着广泛的研究需求与应用场景。与之相关的研究课题主要包括识别不同种类的鸟、狗、花、车、飞机等。在实际生活中,识别不同的子类别又存在着巨大的应用需求。例如, 在生态保护中, 有效识别不同种类的生物,是进行生态研究的重要前提。细粒度图像的类别精度更加细致,类间差异更加细微,往往只能借助于微小的局部差异才能区分出不同的类别。

行人/车辆重识别(ReID)技术是近年来学术界和工业界的热点问题,ReID技术最大的价值就在于其跨摄像头追踪/关联的能力,有时也被称为跨镜追踪/识别。在当前智慧城市、智慧交通、智慧零售的大背景下,如何细粒度地甄别每个个体(行人或者车辆),并进行个体轨迹还原和串联是理解数据、应用数据的关键。2018年、2019年在各大计算机视觉顶级学术会议,都有大量的ReID论文出现,工业界也纷纷公开宣传了其在ReID公开数据集上取得刷新纪录的突破。
针对学员所选的实战项目,进行项目与简历的最终调整与完善。然后除了学员自己投简历找工作之外,增加内推,并跟踪每一次面试的结果,不断辅导迭代,最终拿到offer。
在线直播:项目1 图像分割系统、和项目4 SLAM三维重建系统的总结+面试就业辅导
在线直播:项目2 人体关节点提取、和项目3 给定图像自动生成描述的总结+面试就业辅导
在线直播:项目5 图像细粒度分类、和项目6 跨镜追踪/重识别(ReID)的总结+面试就业辅导
针对学员入职后工作上遇到的技术方面问题,进行一周的跟踪服务,为学员稳定就业保驾护航。

博士毕业于国内Top5高校,在人工智能和模式识别领域发表了10余篇会议和期刊。目前在国内某知名互联网公司担任人工智能算法高级技术专家,有深厚的学术背景和丰富的项目及业务落地经验。Seven老师长期担任校园招聘和社会招聘技术面试官,授课风格深入浅出、诙谐幽默。

中科院CV博士毕业,中国图像图形学会三维视觉专委会委员,目前在百度做CV研发,之前在阿里达摩院做CV研发。
香港中文大学博士,研究方向为计算机视觉、深度学习、增强学习等,主攻深度学习在物体识别与跟踪上的应用。曾作为港中大团队一员,参与ImageNet 2016大规模物体识别比赛获得第一名。在CV、ML等领域的顶级会议(ICCV、ICML)和期刊(IEEE-TIP)上发表多篇论文。曾在MSRA实习,负责人体姿态识别,目前在某名企负责无人驾驶。



“一个人的学习过程中,知识体系通常很零散,虽然网上的教程很多,但是搜集教程并挑选出适合目前自己学习程度的课程也会花费比较大的精力,并且,网上的随处可见的教程、几个烂大街的项目对于简历过筛和面试还远远不够。3月份看到七月在线推出了CV就业第一期课程,于是立马就报名了。”
完整面经>“于是就下定决心上七月在线报班跟老师学,4月份报名,学习了两个月,主要是看视频直播,跟着老师做kaggle项目,修改简历,最后模拟面试。到了6月中旬有两个项目经历就开始在BOSS直聘上投简历。”
完整面经>“项目涉及的各种技术及其关联扩展的详解、为什么要用这种方法思考过程是怎样的、有哪些难点、遇到哪些困难、后期做了哪些优化等问题,都要准备好再去面试。”
完整面经>“今年四月初,正处于换工作阶段。由于有一阶段没有对前沿科技、技术的摄入,需要一段时间进行补充。正巧看到了七月cv就业班的第一期正在招生,相比于个人的集中复习,报班学习能够提供基础知识巩固、技术大牛讲解、实验平台的使用,自己只需要闷头学就好了。也是为了让自己的学习有个“抓手”,就报了CV就业班”
完整面经>2019年10月28日开学,越早报名越早享受到BAT大咖的一对一个性化定制。
一个半月的学习周期(包括直播、录播、实训、答疑、考试),一个半月的项目和就业周期,且配备全职科学家、全职助教、全职就业老师辅助讲师进行课程答疑、项目辅导、简历指导、就业内推。
收费:¥21000
包含课程费用、项目费用、就业费用,审核通过且报名后签订就业协议,了解详情或优惠,敬请咨询。
报名本就业班的步骤如下
PS:申请表和简历不得造假(包括但不限于:学历不得造假、教育经历不得造假、工作履历不得造假,一经发现,立即取消入学资格,且相关后果自负)。
周老师:18910848502(微信同步)
email:july@julyedu.com
 提示:请用个人微信扫描,关注服务号后可提现红包到微信零钱。
提示:请用个人微信扫描,关注服务号后可提现红包到微信零钱。{{blessingTip}}
{{seconds}}s












